Multi-Robot Collaborative Dense Scene Reconstruction
1Shandong University 2National University of Defense Technology (NUDT) 3Google 4Technical University of Munich 5Peking University
ACM Transactions on Graphics 2019 (TOG)
Abstract
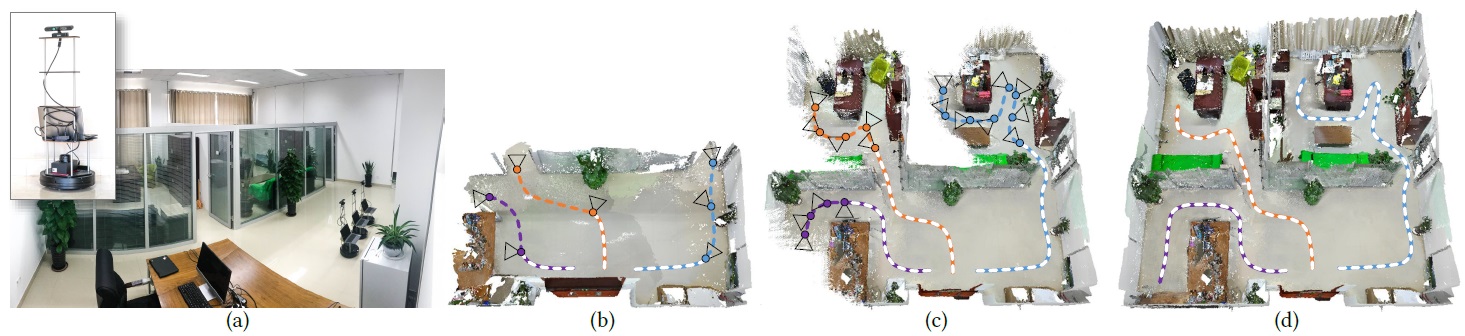
We present an autonomous scanning approach which allows multiple robots to perform collaborative scanning for dense 3D reconstruction of unknown indoor scenes. Our method plans scanning paths for several robots, allowing them to efficiently coordinate with each other such that the collective scanning coverage and reconstruction quality is maximized while the overall scanning effort is minimized. To this end, we define the problem as a dynamic task assignment and introduce a novel formulation based on Optimal Mass Transport (OMT). Given the currently scanned scene, a set of task views are extracted to cover scene regions which are either unknown or uncertain. These task views are assigned to the robots based on the OMT optimization. We then compute for each robot a smooth path over its assigned tasks by solving an approximate traveling salesman problem. In order to showcase our algorithm, we implement a multi-robot auto-scanning system. Since our method is computationally efficient, we can easily run it in real time on commodity hardware, and combine it with online RGB-D reconstruction approaches. In our results, we show several real-world examples of large indoor environments; in addition, we build a benchmark with a series of carefully designed metrics for quantitatively evaluating multi-robot autoscanning. Overall, we are able to demonstrate high-quality scanning results with respect to reconstruction quality and scanning efficiency, which significantly outperforms existing multi-robot exploration systems.
 Bibtex
Bibtex