Real-time Non-rigid Reconstruction using an RGB-D Camera
1Meta 2Technical University of Munich 3Microsoft Research 4Stanford University 5Max Planck Institute for Informatics 6University of Erlangen-Nuremberg
ACM Transactions on Graphics 2014 (TOG)
Abstract
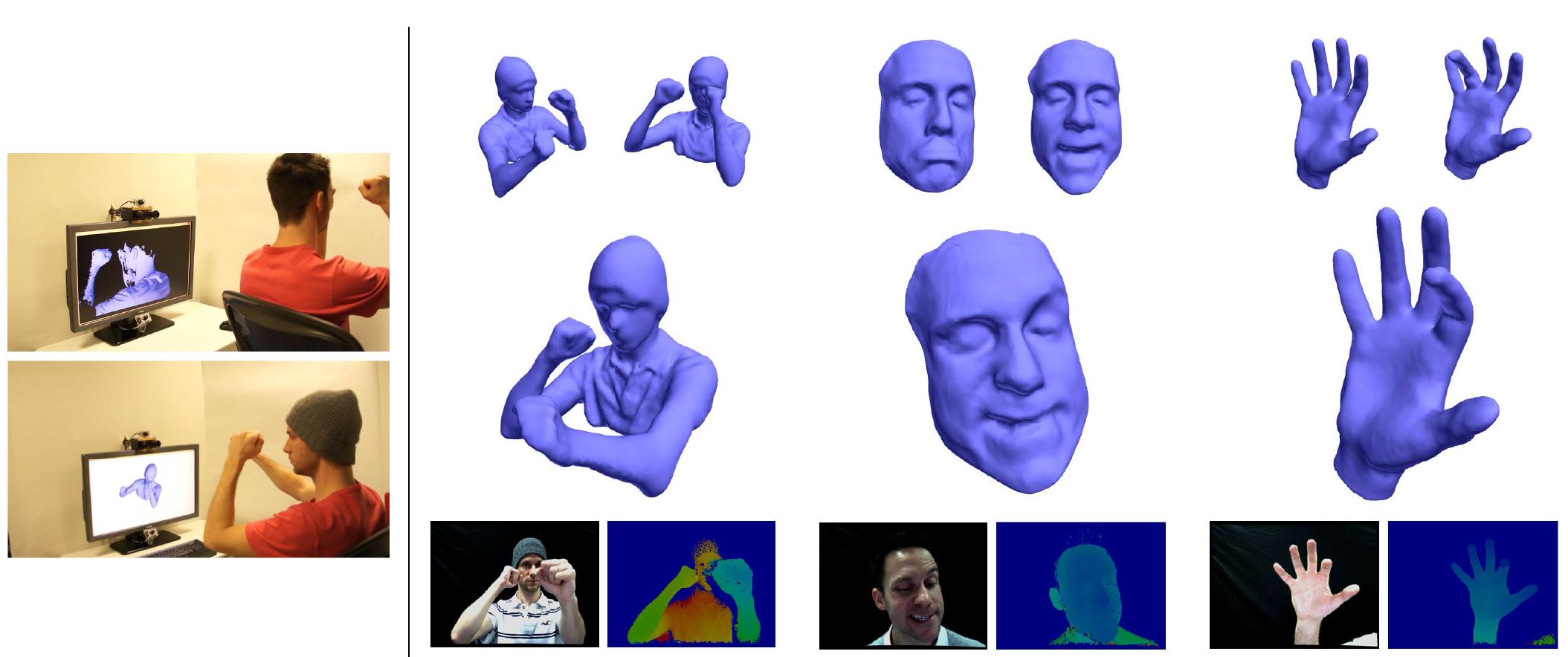
We present a combined hardware and software solution for markerless reconstruction of non-rigidly deforming physical objects with arbitrary shape in real-time. Our system uses a single self-contained stereo camera unit built from off-the-shelf components and consumer graphics hardware to generate spatio-temporally coherent 3D models at 30 Hz. A new stereo matching algorithm estimates real-time RGB-D data. We start by scanning a smooth template model of the subject as they move rigidly. This geometric surface prior avoids strong scene assumptions, such as a kinematic human skeleton or a parametric shape model. Next, a novel GPU pipeline performs non-rigid registration of live RGB-D data to the smooth template using an extended non-linear as-rigid-as-possible (ARAP) framework. High-frequency details are fused onto the final mesh using a linear deformation model. The system is an order of magnitude faster than state-of-the-art methods, while matching the quality and robustness of many offline algorithms. We show precise real-time reconstructions of diverse scenes, including: large deformations of users' heads, hands, and upper bodies; fine-scale wrinkles and folds of skin and clothing; and non-rigid interactions performed by users on flexible objects such as toys. We demonstrate how acquired models can be used for many interactive scenarios, including re-texturing, online performance capture and preview, and real-time shape and motion re-targeting.
 Bibtex
Bibtex